🧐 나의 생각 / 비판 (My Thoughts / Critiques)
-
필요한 3가지 데이터를 모두 제공:
-
시각 데이터: 논문은 각 질감의 고해상도 입체 이미지를 제공합니다. 조인트 임베딩에 필요한 시각 입력임.
-
촉각 시계열 데이터: 가속도계로 측정한 고주파 진동 데이터와 힘 데이터를 제공합니다. 조인트 임베딩에 필요한 촉각 시계열 입력임.
-
촉각 형용사: 심리물리학적 평가를 통해 수집된 ‘Roughness’, ‘Hardness’, ‘Soft’ 등의 주관적 평가 점수는, 각 시계열 데이터가 어떤 ‘촉각 형용사’와 연결되는지에 대한 정답(Label) 역할을 함.
-
-
조인트 임베딩 학습의 직접적인 재료:
-
이 데이터셋을 사용하여, 특정 질감(예: 사포 ‘59t’)의 이미지와 촉각 시계열 데이터를 임베딩 모델에 입력하고, 그 결과 벡터가 ‘거칠다(Rough)‘라는 텍스트 임베딩과 가까워지도록 학습시킬 수 있다.
-
즉, 이 데이터셋은
이미지(X),촉각 시계열(X),촉각 형용사(X)라는, 하나의 객체(X)에 대한 세 가지 다른 형태의 데이터 쌍을 완벽하게 제공한다.
-
1. 목표 (Goal)
-
이 연구의 주된 목표는 새로운 모델 개발이 아니라, 포괄적인 다중 감각(multimodal) 데이터셋을 구축하고 공개하는 것입니다.
-
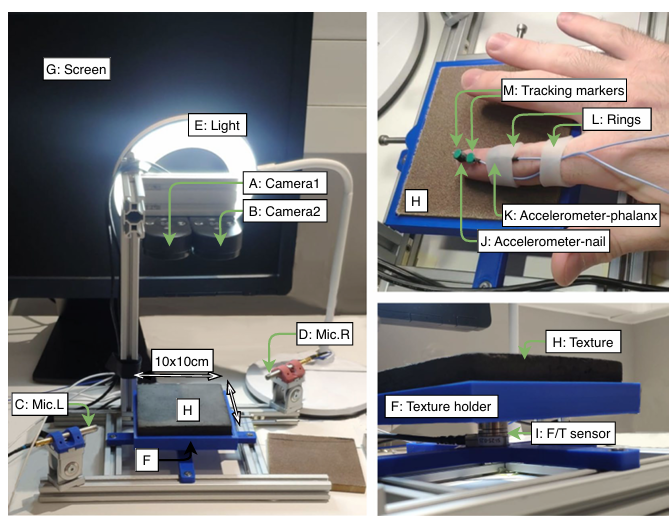
특히, 기존 연구에서 부족했던 사람의 ‘맨손가락’을 이용한 자연스러운 상호작용에서 발생하는 촉각, 청각, 시각 데이터를 동시에 측정하고 동기화하여, 인간의 촉각 인지 연구와 인공지능 개발에 필요한 핵심 리소스를 제공하고자 합니다.
2. 데이터 (Data)
-
참가자 및 표면: 10명의 참가자가 10가지 다른 질감의 표면과 상호작용하며 데이터를 수집했습니다.
-
주요 데이터 종류:
-
시각 데이터: 2대의 4K 카메라를 이용해 각 질감의 고해상도 입체(stereoscopic) 이미지를 촬영했습니다.
-
촉각 데이터 (시계열):
-
힘/토크: 6축 센서가 손가락이 가하는 수직/수평 압력을 측정했습니다.
-
진동: 손톱과 손가락 마디에 부착된 2개의 가속도계가 마찰 시 발생하는 미세한 진동을 12.5kHz의 높은 해상도로 기록했습니다.
위치/속도: 손가락의 움직임을 추적하여 위치와 속도 데이터를 확보했습니다.
-
-
오디오 데이터: 2개의 지향성 마이크가 상호작용 시 발생하는 소리를 녹음했습니다.
-
주관적 평가 데이터 (촉각 형용사): 별도의 참가자 15명이 각 질감에 대해 ‘거칠다(Roughness)’, ‘단단하다(Hardness)’, ‘따뜻하다(Warmth)’ 등 12가지 형용사에 대해 1~10점 척도로 평가한 설문조사 데이터를 포함합니다.
-
3. 모델 구조 (Model Architecture)
-
이 논문은 새로운 모델 아키텍처를 제안하지 않습니다. 논문의 목적은 데이터셋 구축과 검증입니다.
-
데이터셋의 유용성을 입증하기 위한
기술적 검증(Technical Validation) 단계에서 랜덤 포레스트(Random Forest) 분류기를 사용했습니다. 이는 데이터셋의 품질을 평가하기 위한 도구일 뿐, 이 논문의 핵심 결과물은 아닙니다.
4. 주요 성과 (Key Achievements)
-
성과 1: 세계 최초의 포괄적인 ‘맨손가락’ 데이터셋 구축: 맨손가락 상호작용에서 나오는 동기화된 촉각, 청각, 시각 데이터를 종합적으로 담은 최초의 공개 데이터셋을 구축했습니다.
-
성과 2: 다중 감각 정보의 중요성 입증: 여러 감각 데이터를 결합했을 때 표면 분류 정확도가 크게 향상됨을 보였습니다. 특히 오디오와 촉각 데이터를 함께 사용했을 때 83.89%의 가장 높은 정확도를 달성하여, 각 감각이 상호 보완적인 정보를 제공함을 증명했습니다.
-
성과 3: 객관적 데이터와 주관적 인식의 연결: 마찰 진동과 같은 물리적 측정 데이터와 ‘거칠다’와 같은 인간의 주관적 평가를 하나의 데이터셋에 모두 포함시켜, 이 둘 사이의 관계를 직접적으로 연구할 수 있는 기반을 마련했습니다.